
- Urządzenie i opis DPT
- Zasada działania
- Rodzaje DPT
- Zarządzanie
- Obszary zastosowań
- Zalety i wady
- Wideo oprócz napisanego
Pomóż w opracowaniu witryny, udostępniając artykuł znajomym!
Era silników elektrycznych sięga lat 30-tych XIX wieku, kiedy Faraday eksperymentalnie udowodnił zdolność obrotu przewodu, przez który przepływa prąd wokół magnesu stałego. Na tej zasadzie Thomas Davenport zaprojektował i przetestował pierwszy silnik prądu stałego. Wynalazca zainstalował swoje urządzenie na istniejącym modelu pociągu, udowadniając tym samym skuteczność silnika elektrycznego.
Praktyczne zastosowanie DPT odkrył B. S. Jacobi, ustawiając go na łodzi, aby obracać ostrza. Źródło obecnego naukowca obsługiwało 320 ogniw galwanicznych. Pomimo niewygodnego wyposażenia łódź mogła płynąć pod prąd, przewożąc 12 pasażerów na pokładzie.
Dopiero pod koniec XIX wieku zaczęto wyposażać maszyny przemysłowe w synchroniczne silniki elektryczne. Było to ułatwione dzięki świadomości zasady przekształcania energii mechanicznej w energię elektryczną przez silnik prądu stałego. Oznacza to, że za pomocą silnika elektrycznego w trybie generatora udało nam się uzyskać energię elektryczną, której produkcja okazała się znacznie tańsza od kosztów produkcji ogniw galwanicznych. Od tego czasu silniki elektryczne zostały ulepszone i zaczęły zdobywać silną pozycję we wszystkich dziedzinach naszego życia.
Urządzenie i opis DPT
Strukturalnie silnik prądu stałego jest zaprojektowany zgodnie z zasadą oddziaływania pól magnetycznych.
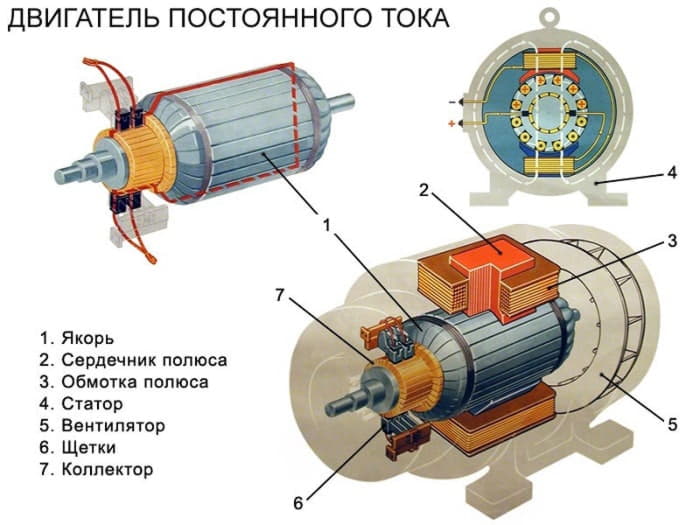
Najprostszy DPT składa się z następujących głównych węzłów:
- Dwa uzwojenia z rdzeniami połączonymi szeregowo. Projekt ten znajduje się na wale i tworzy węzeł, zwany wirnikiem lub kotwicą.
- Dwa magnesy trwałe, obracane przez różne bieguny do uzwojeń. Wykonują zadanie stałego stojana.
- Kolektor - dwie półokrągłe, izolowane płyty umieszczone na wale DPT.
- Dwa stałe elementy stykowe (szczotki), przeznaczone do przesyłania prądu elektrycznego przez kolektor do uzwojeń wzbudzenia.
Powyższy przykład jest raczej modelem roboczym silnika kolektora. W praktyce takie urządzenia nie mają zastosowania. Faktem jest, że taki silnik jest zbyt mały. Działa nierówno, zwłaszcza przy podłączaniu obciążenia mechanicznego.
Stator (induktor)
W modelach nowoczesnych, silnych silników prądu stałego stosowane są stojany, które są również cewkami indukcyjnymi w postaci cewek nawiniętych na rdzenie. Gdy obwód elektryczny jest zamknięty, tworzenie linii pola magnetycznego zachodzi pod wpływem wywołanej indukcji elektromagnetycznej.
Do zasilania uzwojeń cewki indukcyjnej DPT można wykorzystać różne schematy połączeń:
- z niezależnym wzbudzeniem uzwojeń;
- połączenie równoległe do uzwojeń twornika;
- warianty z sekwencyjnym wzbudzaniem wirnika i cewek stojana;
- połączenie mieszane.
Schematy połączeń można wyraźnie zobaczyć na rysunku 2.
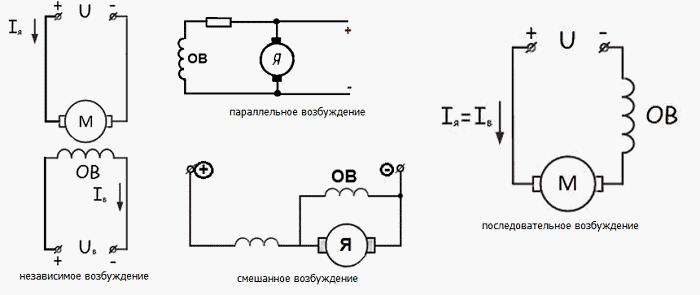
Każda metoda ma swoje zalety i wady. Często metoda połączenia jest podyktowana warunkami, w których oczekuje się działania silnika prądu stałego. W szczególności, jeśli wymagane jest zmniejszenie łuku kolektora, należy użyć połączenia równoległego. Aby zwiększyć moment obrotowy, lepiej jest stosować obwody z szeregowym połączeniem uzwojeń. Obecność wysokich prądów rozruchowych powoduje zwiększenie mocy elektrycznej w momencie uruchomienia silnika. Ta metoda jest odpowiednia dla silnika prądu stałego, który intensywnie pracuje w trybie krótkoterminowym, na przykład dla rozrusznika. W tym trybie pracy części silnika elektrycznego nie mają czasu na przegrzanie, więc ich zużycie jest znikome.
Rotor (kotwica)
Na przykładzie prymitywnego silnika elektrycznego opisanego powyżej wirnik składa się z dwuzębnej armatury na jednym uzwojeniu, z wyraźnymi biegunami. Konstrukcja zapewnia obrót wału silnika.
W opisywanym urządzeniu występuje znaczna wada: gdy zatrzymasz obrót twornika, jego uzwojenia będą stabilne. Aby ponownie uruchomić silnik elektryczny, konieczne jest przekazanie pewnego momentu obrotowego na wał.
Ta poważna wada jest pozbawiona kotwicy z trzema i dużą liczbą uzwojeń. Rysunek 3 przedstawia obraz wirnika trójuzwojeniowego i rys. 4 - kotwica z dużą liczbą uzwojeń.

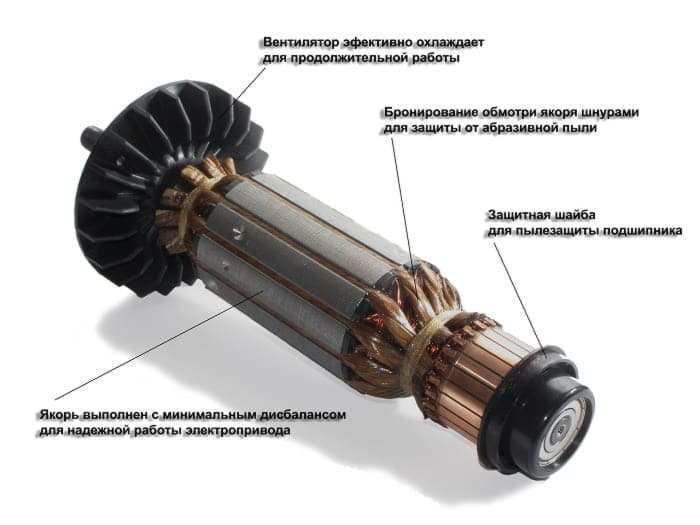
Takie wirniki są dość często spotykane w małych silnikach elektrycznych małej mocy.
Do budowy potężnych silników trakcyjnych oraz w celu zwiększenia stabilności częstotliwości obrotowej stosuje się zworę z dużą liczbą uzwojeń. Schemat takiego silnika pokazano na rysunku 5.
Kolekcjoner
Jeśli zasilacz prądu stałego jest podłączony do sworzni uzwojenia wirnika, kotwica zajmie pół obrotu i zatrzyma się. Aby kontynuować proces rotacji, należy zmienić polaryzację prądu wejściowego. Urządzenie, które wykonuje funkcję prądu przełączania w celu zmiany polaryzacji na zaciskach uzwojeń, nazywamy kolektorem.
Najprostszy kolektor składa się z dwóch izolowanych półokrągłych płyt. Każdy z nich w pewnym punkcie kontaktu ze szczotką, co zmniejsza napięcie. Jedna lamela jest zawsze połączona z plusem, a druga - z minusem. Gdy wał jest obrócony o 180º, płytki kolektorowe zmieniają miejsce, w wyniku czego następuje nowa komutacja ze zmianą polaryzacji.
Ta sama zasada uzwojenia przełączania mocy jest stosowana we wszystkich kolektorach, w tym w urządzeniach o dużej liczbie lameli (para dla każdego uzwojenia). W ten sposób kolektor zapewnia przełączanie wymagane dla ciągłego obrotu wirnika.
W nowoczesnych konstrukcjach kolektorów, listwy są ułożone w okrąg w taki sposób, że każda płyta odpowiadającej pary jest po diametralnie przeciwnej stronie. Łańcuch kotwiczny jest przełączany w wyniku zmiany położenia wału.
Zasada działania
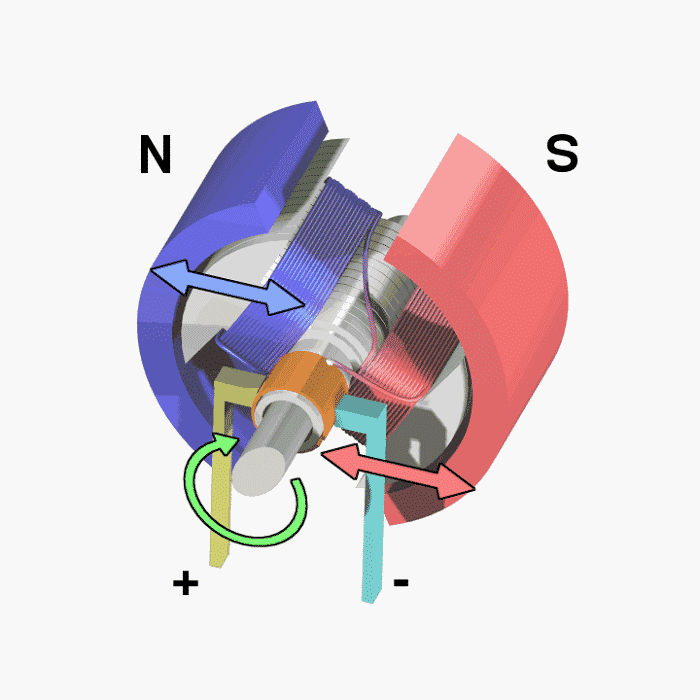
Nawet ze szkoły pamiętamy, że żywy przewód, umieszczony między biegunami magnesu, ma siłę pchającą. Dzieje się tak, ponieważ pole magnetyczne tworzy się wokół drutu na całej jego długości. W wyniku oddziaływania pól magnetycznych powstaje siła „Amperowa”:
F = B × I × L, gdzie B oznacza wielkość indukcji magnetycznej pola, I jest prądem, L oznacza długość drutu.
Wektor Amperova jest zawsze prostopadły do linii strumienia magnetycznego między biegunami. Schematycznie zasada działania jest pokazana na rys. 6
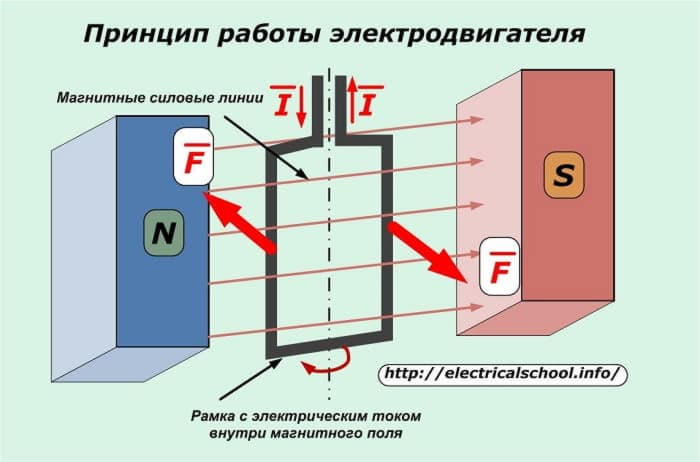
Jeśli zamiast bezpośredniego przewodnika weźmiemy ramkę konturową i połączymy ją z bieżącym źródłem, obróci się ona o 180º i zatrzyma się w takiej pozycji, że wynikowa siła będzie równa 0. Spróbujmy pchnąć ramkę. Wraca do pozycji wyjściowej.
Zmień biegunowość prądu i spróbuj ponownie: ramka wykonała kolejne pół obrotu. Logiczne jest założenie, że konieczna jest zmiana kierunku prądu za każdym razem, gdy odpowiednie zwoje uzwojeń przechodzą przez punkty zmiany biegunów magnesów. W tym celu stworzono kolekcjoner.
Schematycznie można sobie wyobrazić każde uzwojenie kotwicy w postaci oddzielnej ramy konturu. Jeśli jest kilka uzwojeń, to w każdym momencie jeden z nich zbliża się do magnesu stojana i wpływa na nie siła wyporu. W ten sposób utrzymuje się ciągły obrót twornika.
Rodzaje DPT
Istniejące silniki prądu stałego można sklasyfikować według dwóch głównych cech: przez obecność lub brak zespołu szczotek-kolektorów w konstrukcji silnika i przez rodzaj układu magnetycznego stojana.
Rozważ główne różnice.
Dzięki obecności jednostki zbierającej szczotki
Silniki prądu stałego do przełączania uzwojeń, które wykorzystują węzły zbierające szczotki, nazywane są silnikami zbierającymi. Obejmują one szeroką gamę modeli silników elektrycznych. Istnieją silniki w konstrukcji, z których korzysta do 8 węzłów zbierających pędzle.
Funkcje wirnika mogą wykonywać magnes stały, a prąd z sieci elektrycznej jest podawany bezpośrednio do uzwojeń stojana. W tym przykładzie wykonania nie ma potrzeby stosowania kolektora, a problemy związane z przełączaniem są rozwiązywane elektronicznie.
W takich silnikach bezszczotkowych wyeliminowano jedną z wad - iskrzenie, które prowadzi do intensywnego zużycia płytek kolektorów i szczotek. Ponadto są łatwiejsze w utrzymaniu i zachowaniu wszystkich użytecznych cech DCF: łatwość zarządzania związana z kontrolą prędkości, wysoka wydajność i inne wskaźniki. Silniki bezszczotkowe nazywane są silnikami zaworowymi.
Według rodzaju konstrukcji układu magnetycznego stojana
W konstrukcji silników synchronicznych istnieją modele z magnesami trwałymi i DC z uzwojeniami wzbudzającymi. Silniki elektryczne serii, w których stosowane są stojany z przepływem wzbudzenia z uzwojeń, są dość powszechne. Zapewniają stabilną prędkość obrotową wałów, wysoką nominalną moc mechaniczną.
Metody łączenia uzwojeń stojana omówiono powyżej. Ponownie podkreślamy, że charakterystyki elektryczne i trakcyjne silników prądu stałego zależą od wyboru schematu elektrycznego. Różnią się one szeregowymi uzwojeniami i cewkami z równoległym wzbudzeniem.
Zarządzanie
Nietrudno zrozumieć, że jeśli zmieni się biegunowość napięcia, zmieni się również kierunek obrotu twornika. Ułatwia to sterowanie silnikiem poprzez manipulowanie biegunowością szczotek.
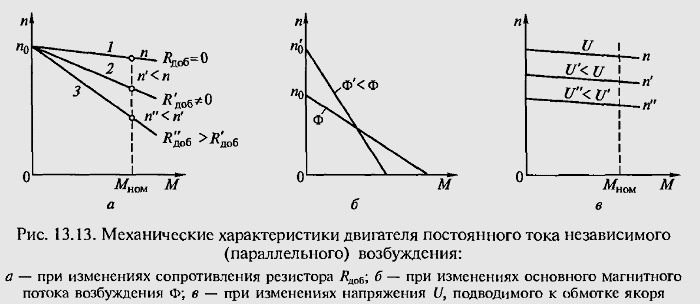
Charakterystyka mechaniczna
Rozważmy wykres częstotliwości w funkcji momentu siły na wale. Widzimy linię prostą o ujemnym nachyleniu. To bezpośrednio wyraża mechaniczną charakterystykę silnika prądu stałego. Do jego budowy należy wybrać pewne stałe napięcie, zsumowane w celu zasilania uzwojeń wirnika.
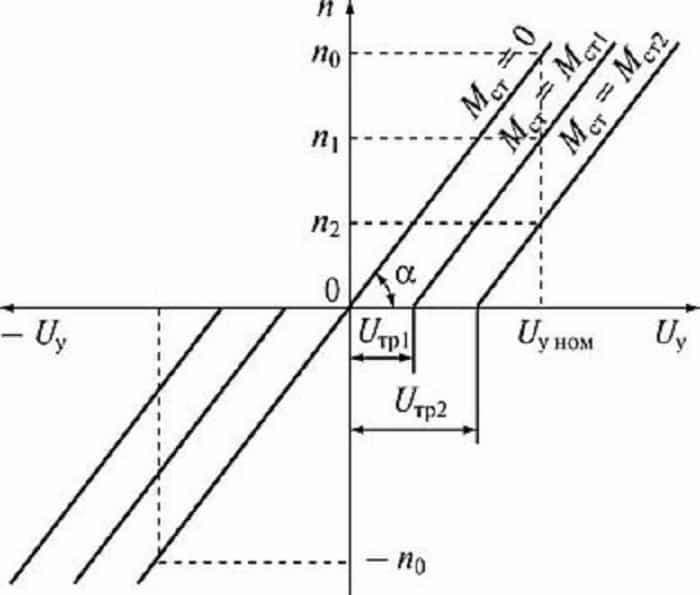
Charakterystyka sterowania
Ten sam bezpośredni, ale z dodatnim nachyleniem, jest wykres częstotliwości obrotowej twornika od napięcia zasilania. Jest to charakterystyka regulacyjna silnika synchronicznego.
Konstrukcja określonego harmonogramu jest przeprowadzana w pewnym momencie opracowanego DPT.
Ze względu na liniowość charakterystyk sterowanie silnikami prądu stałego jest uproszczone. Ponieważ siła F jest proporcjonalna do prądu, przez zmianę jego wartości, na przykład przez zmienny opór, możliwe jest regulowanie parametrów silnika.
Regulacja prędkości wirnika jest łatwa do osiągnięcia poprzez zmianę napięcia. W silnikach kolektorowych wykorzystujących rezystory rozruchowe osiągają płynny wzrost prędkości, co jest szczególnie ważne w przypadku silników trakcyjnych. Jest to również jedna ze skutecznych metod hamowania. Ponadto w trybie zwalniania synchroniczny silnik elektryczny wytwarza energię elektryczną, która może być zwrócona do sieci.
Obszary zastosowań
Wymienione wszystkie obszary zastosowania silników elektrycznych mogą być nieskończenie długie. Na przykład tylko kilka z nich:
- elektronarzędzia domowe i przemysłowe;
- przemysł motoryzacyjny - podnośniki szyb, wentylatory i inna automatyka;
- Tramwaje, trolejbusy, samochody elektryczne, dźwigi i inne mechanizmy, dla których ważne są wysokie właściwości trakcyjne.
Zalety i wady
Zalety to:
- Liniowa zależność charakterystyki silników elektrycznych DC (linie proste) upraszcza sterowanie;
- Łatwa regulacja prędkości;
- dobre właściwości rozruchowe;
- kompaktowy rozmiar.
W silnikach asynchronicznych, które są silnikami prądu przemiennego, bardzo trudno jest uzyskać takie charakterystyki.
Wady:
- ograniczony kolekcjoner zasobów i pędzle;
- dodatkowa strata czasu na konserwację prewencyjną związaną z konserwacją węzłów zbierająco-szczotkujących;
- ze względu na fakt, że używamy sieci z napięciem przemiennym, konieczne staje się skorygowanie prądu;
- kosztowne w produkcji kotwic.
Zgodnie z wymienionymi parametrami, modele silników asynchronicznych okazują się zwycięzcami. Jednak w wielu przypadkach zastosowanie silnika prądu stałego jest jedyną możliwą opcją, która nie wymaga złożoności obwodu elektrycznego.